REPÜLŐMÚZEUM SZOLNOK
Liling Zoltán: Az Il-18-as navigátori panelje
Mészáros András kiegészítéseivel
|
Egy kis előszó: roppant részletes és alapos munkát végzett Zoltán barátunk, aminek az eredményét itt láthatjátok. Nem könnyű olvasmány, de biztos vagyok benne, hogy közületek sokaknak fog tetszeni. Zoltán arra kért, mielőtt közöljük, mutassam meg a cikket egy szakembernek mert tévedés mindig előfordulhat. Lebeszéltem róla: ha közületek valaki hibát talál benne, úgyis megírjátok. Tegyetek így! HS Valóban roppant részletes és alapos munkát végzett Zoltán. Néhány helyesbítést és hozzáfűzést azért engedjetek meg nekem hogy tegyek ezzel kapcsolatban. Ez nem mindig az Il-18-as repülőgéphez kapcsolódik majd, hiszen Zoltán sem csak erről a típusról írt. A megjegyzéseimet az eredeti sorok közé, kék színnel illesztettem be, az esetleges fekete-fehér színű nyomtatás esetére pedig félkövér monogramokat használtam. M.A.
Az Il-18-as navigátori panelje Az orosz gépek eredeti felállás szerinti személyzete mindig tartalmazott egy navigátort, és egy rádióst, a két pilótán és a fedmérnökön és/vagy hajózó szerelőn kívül. A Malév-es használat során az orosz regulától fokozatosan elszakadva és a nyugati viszonyokhoz igazítva a „fedmérnöki” pozíció köré szervezték a két pilóta feladatán túli tevékenységeket.
Az 50-es – 60-as évek géptípusai között (Il-14, An-24, Il-18, Tu-134) navigációs szempontból nagyon sok hasonlóság volt, az alapműszerezettség többé-kevésbé ugyanaz volt. A klasszikus, orosz navigációs felszerelés leginkább kifejlett formája a Tu-154-ben jelent meg. Az orosz „stílusú” navigációs alrendszerek feloszthatók autonóm és rádiónavigációs eszközökre, illetve ezek kombinált kialakítására.
Noha a rádiónavigációban általában mindig a helyi, mágneses északhoz képest mért irány a meghatározó, az orosz rendszer ahol csak lehet a valós földrajzi irányokat és koordinátákat használta. Emiatt a nyugati és az orosz rendszerek használata között jelentős különbség adódik. Előnye a valós irányoknak és koordinátáknak, hogy független a helyi, mágneses jelenségektől, földfelszín alatti nagy kiterjedésű vagy lokális mágneses irányokat befolyásoló rétegtartalmaktól (vasérc, olaj, víz „mezők”), a Nap tevékenységétől és a mágneses irányokat időről időre befolyásoló változásoktól. Előnye még, hogy a földfelszín mentén lehetővé teszi a főkör mentén történő navigációt, azaz a Föld gömb (geoid) felületén két pont közötti legrövidebb úton való haladás számítását (és megfelelő műszerrel annak követését). Hátránya, hogy a tényleges irányok és koordináták megállapítása, követése számos, összetett, navigációs számítást igényel, és folyamatos munkát ad a személyzetnek. Ezért volt szükség önálló navigátorra.
Az orosz navigációs alrendszerek gyakorlatilag minden esetben ezt a navigációs számítási feladatot próbálták gépesíteni, és így a kor technikai színvonalának megfelelő (szerintem zseniális) analóg mechanikus és elektromechanikus célszámítógépeket építettek. Ezek az eszközök többnyire képesek voltak a repülőgép robotpilótáját is vezérelni, alapvetően útszakasz vagy útszakaszok lerepülésének mértékéig. Mindezek gyökere legalábbis részben visszavezethető a II. világháborús amerikai technikára, részben a giroszkópos stabilizálású robotpilóta technológiára, és valamennyire emlékeztet az útszakasz során a gépet irányban tartó Norden-bombacélzó berendezésre, ami a robotpilótának adott vezérléssel tartotta a gépet a bombavetéshez szükséges irányon.
A rádiónavigációs eszközök a – Malévnél is használt típusváltozatokon - a közismert ADF (oroszul ARK), VOR és DME rendszerek, illetve az ILS leszállás irányító rendszer. Azonban a Szovjetunió feletti repülések során önálló rádiónavigációs hálózatot használtak (RSzBN), ami valamivel a VOR/DME rendszer előtt jelent meg, és valamivel nagyobb hatótávolság mellett a VOR/DME letisztultságán túl összetettebb funkciókra is alkalmas volt. Az ILS-hez „hasonló” orosz leszállító rendszer az SzP-50 volt, ez annyira '”hasonló” volt az ILS-hez, hogy ILS vevőt SzP-50 módban használva az oldal- és függőleges csatornainformációkat megfordítva (fel-le, balra-jobbra) balesetet is okozhat figyelmetlenségből. (Ahogy ez történt a hetvenes években Ferihegyen, egy SzP-50 módban leszálló 154-essel, ami a bevezető fénysort „elkaszálta”. Ennek a következménye lett később az ILS-SzP50 mód fedélzeti átkapcsolójának „beszögelése”, egy masszív, reteszelt ráhajtós fedéllel.) M.A.: Az említett esemény 1984. december 21-én történt a HA-LCO lajstromjelű repülőgéppel Ferihegy 31-es jobb pályájának megközelítése közben, amikor a kapcsoló tévedésből ILS helyett SzP-50 állásban volt. A repülőgép nem a bevezető fénysort vitte el, hanem a közeli NDB adó antennáját, és eközben megsérült a repülőgép fékszárnya. A repülőgép átstartolás után új körre ment, majd rendben leszállt. A kapcsolófedél felszerelésének bulletinjét 1985-ben adták ki és hajtották végre a Malév összes Tu-154B-2 típusú repülőgépén.
M.A.: Az RSzDN rövidítés önmagában csak annyit jelent, hogy távolnavigációs rádiótechnikai rendszer, és nem határoz meg konkrét rendszertípust. Minden távolnavigációs rádiótechnikai rendszer RSzDN, amihez hozzátesznek egy azonosító jelet, számot vagy szót. Például az amerikai haditengerészet igényeinek megfelelően kifejlesztett Omega navigációs rendszert (ONS) a Szovjetunióban is használták RSzDN-Omega néven. E rendszer fedélzeti vevőkészüléke az Aeroflot Tu-154-es és Il-62-es repülőgépeiben is bent volt. A hiperbolikus navigációs rendszer pedig az Omega. A LORAN-C valójában az egyes adóktól érkező jelek időkülönbségét méri. A LORAN-C távolnavigációs rendszer ugyan, ám nem tesz lehetővé globális navigációt. Ezt az amerikai parti őrség (USCG – Costal Guard) igényei szerint hozták letre, és az adóállomások elhelyezkedése miatt a Szovjetunió területét illetően csak annak távol-keleti részén volt használható. Az Omega viszont a műholdas GPS elterjedése előtti korszak globális navigációs rendszere volt.
M.A.: Nem kellett külön VOR és külön DME frekvenciát beállítani, mert a DME távkezelőjén is a DME adóval egybeépített VOR adó frekvenciáját kellett beállítani, és a navigátor (vagy pilóta) nem is tudta, hogy milyen DME frekvenciára hangolt. A korszerű utasszállító repülőgépek a VOR/DME szerinti navigációt már több mint húsz éve nem használják, hanem a DME/DME szerinti navigációt. (a B-737-300-tól)
Az RszBN (Raditechnicseszkaja Szisztema Blizsnyeje Navigacijá: közeli rádiónavigációs rendszer) a „VOR radiál” helyett az „Azimut”-ot, a „DME távolság” helyett az „Orbita” fogalmát, azaz az adótól egyenlő távolságra levő „öv” fogalmát használja. M.A.: Az RSzBN rövidítés önmagában csak annyit jelent, hogy közelnavigációs rádiótechnikai rendszer, és nem határoz meg konkrét rendszertípust. A Tu-134-es és a Tu-154-es repülőgép-változatokban RSzBN-2Sz típusú közelnavigációs rádiótechnikai rendszer működött. Az exportra gyártott repülőgépekbe ezt csak a megrendelő kérésére építették be. Például a Malév repülőgépeiben RSzBN nem volt, sőt, amikor a Malév átvette üzemeltetésre az Aeroflottól a HA-LCU és a HA-LCV lajstromjelű Tu-154-es gépeket, akkor kérésére ezt eltávolították azokból.
A repülések során nagyon fontos a gép aktuális pozíciójának ismerete. Ez rádiónavigációs eszközökkel kiválóan megoldható – ott, ahol van elérhető rádiónavigációs adó. A repülőgép helyzetét azonban ezek nélkül is tudni kellett követni. Ezért alakult ki a „térképi követő” rendszer, ami különböző formákban valósult meg. A rendszer alaprendszere az NI-50BM navigációs indikátor rendszer volt, ami három fő műszerből állt. A pozíciókövetés elve az volt, hogy egy ismert referenciapontból elindulva mérik és kijelzik a gép haladása során a térképi „keleti” és „északi” irány mentén megtett távolságokat. Ez a normál, térképi derékszögű koordinátarendszerben a haladás során folyamatosan egyre növekvő (vagy időnként csökkenő) észak és kelet irányú távolságot fog eredményezni. Ezt igen nehéz lenne követni, ezért a rendszer lehetőséget biztosít arra, hogy a térképünk feletti északi irányt beforgassuk a kívánt útirányba. Ez azzal az eredménnyel jár, hogy ha a kívánt útirány egybeesik a térképelforgatás szögével (térkép-szög -”ugol karti”), úgy a megtett út elforgatott „északkal” egybeeső része lesz az előrehaladás mértéke, a kijelölt úttól való oldaleltérés pedig a „keleti” irányban 0-tól eltérést mutat. Ha megfelelően az útszakaszon haladunk, akkor csak az „északi” irány szerinti távolság növekszik, a keleti irányban folyamatosan 0-t látunk. Ezért, ennek a rendszernek szüksége van a térképszög és a kívánt útirány szögének bevitelére, valamint a gép hossztengelye és a haladási irány által bezárt széleltérítés szögének és a szél sebességének beállítására. M.A.: A térképszög és a kívánt útirány szöge ugyanaz. Ezt kellett beállítani. A széleltérítés szög és a szélsebesség értékeire nem volt egyidejűleg szükség. A rendszer ugyanis vagy a széleltérítési szöggel és a földfeletti sebességgel számolta a megtett utat, vagy pedig a széliránnyal, a szélsebességgel és a repülőgép valós légsebességével, egymástól eltérő képletekkel. Természetesen mindkét üzemmódban szükség volt a térképszög és az irányszög értékeire is.
Mindezek alapján a rendszer a repülőgép barometrikus műszereiből származó információ szerint képes követni a gép haladását. Gyakorlatilag sebességvektorok vetületei szerinti, idő alapú integrálást végez az eszköz, mint egy klasszikus analóg-mechanikus számítógép. Ez már az Il-14-ben is megtalálható volt, és folyamatos fejlesztéssel a Tu-154-nek is volt ennek megfelelő rendszere. Az eszköz használatát nagyban érinti a széleltérítés szögének meghatározási módja: amennyiben kézzel történik, úgy a navigátornak folyamatos munkát ad.
M.A.:
Nem csak a széleltérítési szögnek, hanem a földfeletti sebességnek (w) a
meghatározási módja is adott folyamatos munkát a navigátornak. Természetesen
elsősorban akkor, ha az autonóm navigációs rendszer szerint repültek, ami a
Malévnál ritka volt. Az Il-14-est is rádióiránytűvel repülte a Malév. A fenti rendszer egészült ki az Il-18 és a Tu-134 esetén a „Trassza” rendszerrel, ami szárazföld feletti haladásnál egy Doppler-elvű radartól kapja a tényleges haladási sebességet, illetve a széleltérítés szögét. M.A.: Víz feletti haladásnál is! A felszín eltérő visszaverő képessége miatt a Trassza Doppler-radarjának másképpen kellett működnie. Erre szolgált a Szárazföld-Tenger (Szusa-More) kapcsoló a DISzSz-3P típusú Doppler-radar távkezelő egységén, a navigátor munkahelyének jobb oldalán. Magyar Il-18-ason ez csak a HA-MOI lajstromjelűn volt. Emellett az RPSzN-2 felderítő radarnak is volt Doppler-elven működő üzemmódja, és ez volt az az eszköz, ami valóban nem volt alkalmas víz feletti repülés esetén a széleltérítés vagy a földfeletti sebesség meghatározására.
Az autonóm navigációs rendszer navigációs indikátora tudott teljesen autonóm módon működni, kizárólag barometrikus adatok alapján (ez pl. tenger felett vagy 10 foknál nagyobb bedöntés esetén volt szükséges), vagy a Doppler radar szerint. M.A.: Kizárólag barometrikus adatok alapján nem tudott működni. A géptengely-irányszög értékére például mindig szüksége volt, és a szélirány és a szélsebesség sem barometrikus adat. Emellett a Doppler-radarral való működési mód is teljesen autonómnak számító üzemmód volt, mert annak sem volt szüksége semmilyen repülőgépen kívüli segítségre: földi rádióadóra vagy műholdra. A 10°-nál nagyobb bedöntés esetén való üzemmód-átkapcslás csak a Trasszás – DISzSz-3P típusú Doppler-radarral működő – autonóm navigációs rendszerre vonatkozik.
Mindkét esetben időközönként újra kellett igazítani valamilyen földi vonatkoztatási pont szerint, a fölöttük való átrepüléskor.
A navigációs indikátor fő műszerei: 1 – Irányautomata, 2 – Szélmegadó, 3 – Koordináta számláló M.A.: 1 – Típusa AK-1, 2 – Típusa ZV, 3 – Típusa SzCs.
(Képek a „Repülőgépvezetés” c. tankönyvből, Moszkva, „Transzport” kiadó, 1973)
Ezeknek a gépeknek az irányrendszere hagyományos giroszkóp alapú volt. Az Il-18-nál és a Tu-134-nél is a műhorizontok számára volt egy-egy fő giró, illetve a függőleges irány önálló meghatározására központi giróvertikálok szolgáltak. A fő girókat a repülés kezdete előtt a földön hozzá kellett igazítani a kiindulási hely valamilyen irányához. M.A.: Itt egy kis félreértés van, mert a műhorizontok számára jeladóként szolgáló girók nem az irányrendszer giroaggregátjai voltak, hanem a robotpilóta pörgettyűs függőlegesei, amelyek a repülőgép dőlési és bólintási szögeinek meghatározására szolgáltak a mindenkori földi függőleges segítségével, és ezeket nem kellett az irányhoz igazítani, hanem dőlési és bólintási szög szerint a kereteiket alaphelyzetbe kellett állítani – arretálni – kellett azokat. Azok a girók viszont, amelyeket a pillanatnyi mágneses irányhoz kellett állítani, azok az irányrendszer giroaggregátjai voltak. Az irányrendszernek csak egy fő giroszkópja volt, a másikat tartaléknak hívták (ez kettő darab GA-1T típusú giroaggregátot jelentett), a robotpilóta giroszkópjai szintén fő és tartalék megnevezésűek voltak (ez kettő darab CGV-4 típusú pörgettyűs függőlegest jelentett), kivéve a Tu-134-esen, ahol ezeket bal és jobb CGV-nek nevezték.
Ez a „valamilyen” a helyi mágneses irány, és a helyi mágneses-tényleges irány eltérése alapján történt. A navigátori panelen található egy giróegyeztető és beállító panel, amely a fő- és tartalék mágneses irányokat felvevő érzékelők számára (mágneses giróiránytű) tették lehetővé a helyi mágneses irányra beállást. Egy önálló, nagyon pontosan kalibrált korrekciós mechanizmus tette lehetővé a mágneses és földrajzi irány közti korrekció bevitelét, ami alapján a tényleges földrajzi irányra állított fő girók „hozzáigazodtak” a mágneses irányvevőkhöz. Az Il-18-on és egyes Tu-134-eken az irányrendszernek volt egy harmadik forrása, a Nap állásának, a kiindulási hely koordinátáinak, és az onnan, a kiinduláskor látható Nap égi koordinátáinak bevitele után a egy automatikus, fotoelektromos érzékelőn alapuló, csillagászati műszerrel való automata meghatározása, az asztrokompasz vagy asztrokorrekció. Ez a funkció a 154-esen a panelen ugyan rajta van, gyakorlatban a Malév gépein nem volt beépítve. M.A.: Az asztrokompasz a Tu-154-en kívül a Malév Tu-134 és Tu-134A típusú gépeibe sem volt beépítve. A Malév Il-18-as repülőgépeiben ugyan bent volt eredetileg – ez a DAK-DB-5 típusú csillagászati navigációs rendszer –, de azt a hetvenes években kiszerelték, mert teljesen feleslegesnek bizonyult a földi rádiótechnikai eszközökkel jól ellátott európai útvonalhálózaton. Viszont mindegyik említett repülőgéptípus irányrendszerének távkezelő pultján az „AK” üzemmód kiválasztó kapcsolója megtalálható volt, a Malév gépein is. Asztrokompasz Tu-134-esen csak a navigátor-kiképzésre használt Tu-134S típuson üzemelt.
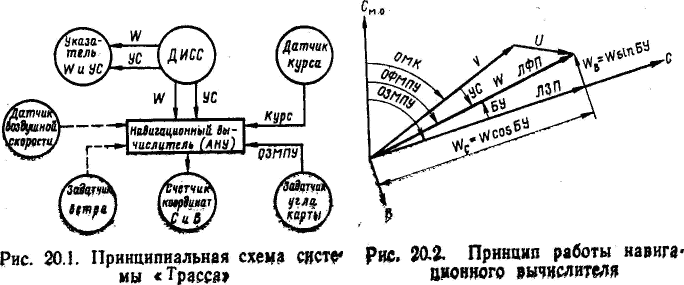
Illusztráció: Balra: a „Trassza” rendszer blokkvázlata: M.A.: A Trassza rendszer a Malév Il-18-as repülőgépei között csak a HA-MOI lajstromjelűbe volt beépítve, a többibe nem. A HA-MOI Il-18D, egy megnövelt hatótávolságú változat volt, a Malév többi gépe pedig Il-18V típus.
Középen az autonóm navigációs rendszer (az analóg számítógép),”9 óra” felől az óra járása szerint sorrendben: M.A.: A rajzon középen ábrázolt analóg számítógép az ANU-1 típusú autonóm navigációs rendszer BK-1 típusú számítóegysége.
IAS mérő barometrikus műszer („légsebesség mérő”) M.A.: Nem IAS (vműszer), hanem TAS (vvalós) mérő. Ez a műszer volt a DVSz típusú légsebesség adó, ami nem jelzőműszer volt, hanem egy a navigátor munkahelye alatt elhelyezett egység, bár ennek előlapján is volt egy kis ablak a mért valós légsebesség leolvashatósága érdekében. A Pitot-cső hibájának kikompenzálása céljából tartozott ehhez két P-1 típusú hőmérsékletérzékelő is a repülőgép oldalán. Az IAS (vműszer) pedig a repülőgép vezetéséhez szükséges, a navigációhoz nem.
TAS (haladási sebesség) és széleltérítés szögének kijelzője M.A.: Ez a műszer nem a TAS (vvalós) kijelzője volt, hanem a földfeletti sebességé, a w-é. A vvalós csak akkor egyezik meg a w-vel, ha nem fúj a szél, azaz u=0. Lásd: szélháromszög! A w-t a DISzSz-3P típusú Doppler-berendezés határozta meg. A Malév Il-18-asai között csak a HA-MOI lajstromjelű repülőgépen volt ilyen műszer. (A műszerről egy fényképet is mellékelek egy elkövetkező szövegrészhez csatolva.)
„DISzSz”: Doppler-elvű haladási sebesség és széleltérítési szög mérő M.A.: DISzSz a Malév Il-18-as repülőgépei között csak a HA-MOI lajstromjelűn volt, a többin nem. A Trassza összefoglaló név pedig csak arra az autonóm navigációs rendszerre vonatkozott, amely a DISzSz-szel is együttműködött a fedélzeten.
Irány adója → Irány M.A.: A géptengely-irányszög jelét a KSz-6 irányrendszer US jelzőműszere – annak körpotencióméteres adója – szolgáltatta az autonóm navigációs rendszer számára.
Térképszög beállítója → Térképszög Koordinátaszámláló észak („C”) és kelet („B”) szerint Széljellemzők beállítása (sebesség, irány) M.A.: A szélsebességet, a szélirányt és a térképszöget ugyanazon az egyesített jeladón, a ZV típusú egységen kellett beállítani mind a „Trasszás” ANU-1, mind a Trassza nélküli, NI-50BM-3 típusú autonóm navigációs rendszerek esetében is. A NI-50BM-3 típus a HA-MOA-tól -MOH-ig lajstromjelű repülőgépeken, az ANU-1 típus pedig a HA-MOI-n üzemelt. Mindkét rendszernek sajátossága volt az, hogy a térképszöget egyszerre két kezelőszerven is be kellett állítani. A NI-50BM-3 rendszer esetében az említett ZV, valamint az AK-1 típusú irányautomatán is, az ANU-1 típusú rendszer esetében pedig a ZV-n kívül a ZUK-1 típusú térképszögadón is. Ezzel a módszerrel a tervezők megspóroltak egy követőrendszert. ZUK-1 típusú egység csak a HA-MOI-n volt, és az AK-1 típusú irányautomata helyére szerelték a navigátor műszertáblájára, mivel azon a gépen az AK-1 megszűnt. Ahelyett egy BK-1 típusú számítóegység üzemelt, amely nem egy jelzőműszer-formájú berendezés volt, hanem egy viszonylag nagy doboz, amit a navigátor munkahelye alatt helyeztek el.
M.A.:
Készítettem egy fényképet a ZUK-1 típusú térképszög-adóról. A középen
elhelyezett gombbal lehetett beállítani a térképszöget. Ez már nem
jelezte ki az irányszöget, amit elődje – az AK-1 – a repülőgép-formájú
mutatójával még jelzett. Jobbra : navigációs számító eszköz elve: C és B („Sz”, és „V”), az elforgatott koordinátarendszer északi és keleti irányának tengelye. W tényleges haladás a V sebesség és U széleltérítés vektorának összege. (LFP:Linyeja fakticseszkava putyi: tényleges haladás vonala). A megkívánt haladási irány az LZP (Linyeja zandannava putyi: megadott út iránya), ami az elforgatott koordinátarendszer szerinti „észak”-kal esik egybe. Usz – haladási irány és a gép hossztengelye által bezárt széleltérítési szög, BU – Bokovoje Uklonyenyija: a kívánt és tényeleges irány közti eltérés szöge. WB = számlálón W megkívánt útirányra merőleges vetülete, amit oldaleltérésként mutat a műszer. (Ha arra megyünk, amerre szeretnénk, azaz LFP=LZP, akkor BU=0, és WB=W*0). M.A.: Azaz wB=0. Az előrehaladás mértéke WC=W-nek út menti vetülete. M.A.: Az alábbi ábra és az ahhoz tartozó szöveges rész a Malév Il-18 típusú gépei között csak a HA-MOI lajstromjelűre vonatkozik. A többi gépre nem, mert azokon nem volt sem DISzSz, sem ANU-1 rendszer, azaz összefoglaló nevükön a Trassza.
Ezek után jöjjön az Il-18-as navigátori munkahelye:
Megjegyzés: 2008 augusztus hónapban ez a kép a Hónap Fotója. 8 Mpixeles-es felbontásban a feliratok is jól látszanak. Ha érdekel most töltsd le, mer szeptembertől más kép lesz a helyén !
A bal szélen, oldalt, fent a repülőgép-vezérlés, az üzemanyag-rendszer és a navigációs rendszerhez (valamint a stb-hez) tartozó „kisautomaták” (AZSz-ek, „ázéesz”) találhatók. Érdemes megfigyelni a kapcsolók alatti rudat, amin középtájon egy kis fogantyú van: a fogantyúnál fogva felfelé egyszerre egy egész sor felkapcsolható. Azonban, mivel nincs összekötve a rúd a kapcsolókkal, ezért lefele nem kapcsolja őket, vagy maguktól, vagy kézzel lehet őket lekapcsolni. Tőle jobbra a piros panel a repülőgép fedélzeti telefon rendszer (SzPU: Szamaljotnoj Peregavornaja Usztrojsztva) és a rádiórendszerek között: ez a navigátor „mellékállomássa”, amin átkapcsolóval választhat a lehetséges (csak vevő vagy adó/vevő) „csatornák” között : VHF rádiók, ARK vevők, VOR vevők, vagy HF (rövidhullámú) rádió.
alatta levő „Ugol sznosza” tekerővel határozhatja meg a radarkép alapján a széleltérítés szögét. M.A.: A nagy, betekintő-árnyékolós műszer nem a „Trassza” Doppler-radarjának kijelzője, hanem az RPSzN-2 típusú „Embléma” radar kijelzője. Az RPSzN-2 radarnak is voltak a széleltérítési szög és a földfeletti sebesség meghatározására szolgáló üzemmódjai, és tudott Doppler-elven is mérni. A széleltérítés szögét például úgy lehetett meghatározni az RPSzN-2 segítségével, hogy a navigátor leállította az antenna lengését, majd egy motort vezérelve kézzel irányította a nagyfrekvenciás sugár irányát. Ebben az üzemmódban a navigátornak az indikátoregység kisméretű katódsugárcsövét kellett figyelnie. Ezen a céljelek képe futott, amit meg lehetett állítani az antenna elfordításával. A kép akkor állt meg, amikor a visszavert jelek Doppler-összetevőiből mért lebegési frekvencia a legkisebb volt. Ekkor le kellett olvasni az Ugol Sznosza feliratú tekerő szögértékét. Ez volt a pillanatnyi széleltérítés. A fenti fénykép a HA-MOE jelű repülőgépen készült, amelyen nem volt Trassza.
Szintén ezen olvashatja le az eszköz által mért tényleges sebességet a „dob” számlálón (hasonlít a régi magnók szalagszámlálójára). M.A.: Ezen a navigátor nem leolvashatta, hanem itt ő állította be az általa kiszámolt földfeletti sebességet, amit az indikátorernyőn ő maga határozott meg egy stopper felhasználásával. A széleltérítési szög meghatározása után a radar sugárnyalábját a mért szögön hagyta, majd megmérte, hogy egy kiválasztott céljel mennyi idő alatt ért az egyik léptékvonaltól a másikig. A léptékvonalak távolságából és a mért időből sebességet számolt. A navigátor által az RPSzN-2 segítségével meghatározott paraméterek: a széleltérítési szög és a földfeletti sebesség értékeivel arányos elektromos jelek eljutottak az autonóm navigációs rendszerbe a radarindikátor alsó részén elhelyezett számkerekes és -tárcsás adókról, amelyeket a navigátor tekert be kézzel. Az RPSzN-2 típusú radart viszont, ellentétben a DISzSz-3P típusú Doppler-berendezéstől (amit szintén neveznek radarnak) nem lehetett felhasználni vízfelszín, vagy sivatag, tehát a viszonylag sík területek feletti repülések során sem a széleltérítés, sem a földfeletti sebesség meghatározására, mert nem jelent meg a radarindikátor ernyőjén olyan, a földről visszavert jel, amely alapján a navigátor dolgozni tudott volna. Ezért fejlesztették ki a DISzSz Doppler-berendezést az autonóm navigációs rendszer számára segítségnek, egyben a navigátor tehermentesítésére, mert attól kezdve neki már nem kellett az RPSzN-2 radart felhasználnia erre a célra. A DISzSz lefelé sugározott, a repülőgép alá, és egy háromsugaras rendszert képezett. Antennája – a „tepsi” – az Il-18-as repülőgépen a törzs alján, a farokrészhez közel volt elhelyezve. (A Malévnál csak a HA-MOI-n.)
M.A.: A fényképen a DISzSz Doppler-radar jelzőműszere látható, amelyen a navigátor immár tényleg leolvashatta a széleltérítési szög és a földfeletti sebesség értékeit, és nem kellett már azokat meghatároznia az RPSzN-2 radar segítségével.
Az asztalban látható iránytárcsa alatt egy önálló giroszkóp van, a tárcsán ennek vízszintes iránykijelzője látszik. M.A.: Ez a GPK-52AP típusú ún. féliránytű (félkompasz).
Ennek alapján az „UFO” kapcsolója egyértelmű. Ezektől jobbra, kicsit lent egy fekete panelen két tekerőgomb található: ezek az asztalba épített giró kezelőszervei: a giró alapirányának beállítására (balra-jobbra), illetve a giró földrajzi helyzete szerinti, az út során várható átlagos földrajzi szélesség beállítására szolgáló értékmegadó, amivel a giró a haladás közbeni „elmászást” korrigálja. M.A.: Ez a GPK-52AP típusú féliránytű GPK-52PU típusú távkezelő egysége.
M.A.: Két, egymásra merőlegesen szerelt keretantennája az Il-18-asokon alkalmazott ARK-változatok között csak az ARK-11 típusnak volt. Az Il-18-as repülőgépeken eredetileg alkalmazott ARK-5 típusnak nem volt, amely a HA-MOE lajstromjelű repülőgéppel bezárólag üzemelt a Malévnál. Annak csak egy keretantennája volt, ahogyan a – a Malévnál egyébként nem alkalmazott – ARK-9 és ARK-10 típusoknak is. A Malév repülőgépein az ARK-5 típust idővel az annál korszerűbb ARK-11-re cserélték. A HA-MOF lajstromjelű repülőgéptől kezdve már ARK-11 típus volt felszerelve gyárilag is.
Ennek az elfordulási szöghelyzetnek az átvitelére egy szelszin rendszer szolgált (szöghelyzet-érzékelő az elforgatott keretnél-elektromos szöghelyzet továbbító - elfordulás megjelenítő műszer bemenetre kapcsolása) Az automatikus üzemmódban magától állt rá az antenna az ADF adó irányára. A rendszer elemeit többféle módon (automata, kézi kompasz és közvetlen vétel) kapcsolva lehetett használni Ennek a beállítására szolgálta az ARK vevő fő üzemmód kapcsolója, ami balra fent található: kikapcsolás, kompasz (automata iránykeresés a nem irányított és a kereső keretantenna együttes használatával – normál használat) mód, antenna mód: közvetlen vétel, ADF adó jelének „füllel” keresésére , vagy „keret” mód, amikor az iránykeresés nem automatikus, hanem a pult jobb alsó sarkában levő keretvezérlőkkel kézzel balra-jobbra elfordítva manuálisan történik. A legutolsó, „Komp II” módban az KompI-től eltérően nem az irányítatlan és a fő keretantenna van rákapcsolva a vevőre, hanem az irányítatlan antenna helyére a fő keretantennára merőleges elhelyezésű, azzal egy tengelyen levő, együtt elforduló, kiegészítő keretantenna kapcsolódik. Ennek a szerepe az erős, elektromos kisüléses zavarokkal nehezített körülmények közti automata működés biztosítása:: a fő vett jelre nézve 90 fokban elfordított helyzetű kiegészítő antenna az elektromágneses hullámok főantenna irányába eső mágneses részét érzékeli, az elektromos zavar kevésbé hat rá. M.A.: Viszont az irányítatlan antenna nélkülözése miatt a Kompasz II üzemmód nem volt alkalmas a rádióállomás irányának egyértelmű meghatározására. A mutatott irány vagy helyes, vagy azzal 180 fokkal ellentétes volt! Ezért ennek használatakor más módszerrel is meg kellett győződni az irány helyességéről.
A vett jel lehallgatásának hangerejét az alul középen levő tekerőgombbal lehetett szabályozni. A papírtáblákra be lehetett írni bal oldalon a betárolt ADF adók listáját és frekvenciáját, a jobb oldalira továbbiakat lehetett jegyzetelni.
M.A.: Ezt a lehetőséget akkor vették igénybe, amikor a keretantennát kézi távvezérléssel forgatták, és az indikátor műszer kitérésének nagysága alapján határozták meg az irányt. Ezt a módszert kis vételi jelek esetén használhatták, ha nem volt a közelben olyan földi NDB adó, vagy olyan műsorszóró rádióadó, amelynek elegendő nagyságú jele lett volna a rádióiránytű Kompasz üzemmódjának használatához, amelyben az iránymeghatározás automatikusan történt. Ilyen eset azonban Európában nem fordulhatott elő a sok földi rádióadó következtében.
A jobb oldali ARK-tól még jobbra, lent található nagy, ezüst színű, kerek műszer a KM-4 korrekciós mechanizmus, ami a mágneses és tényleges irányok közti különbség bevitelét és a mágneses korrekciós (MK) mód használatakor a korrekciós mechanizmus beállítását tette lehetővé. M.A.: Helyesebben az irányrendszer beállítását – az ún. kompenzálását – tette lehetővé a korrekciós mechanizmus beállítása.
M.A.: A földön álló – próbázó – repülőgépen nem volt szükség az adatrögzítő berendezés kikapcsolására, ha azt korábban mi magunk nem kapcsoltuk be. A felvétel csak akkor indult el magától, ha a repülőgép sebessége elérte a 70 km/h értéket (ezt a jelet az SzSzA-0,7-2,21 típusú sebességadó szolgáltatta) vagy akkor, amikor a futómű kirugózott a felszálláskor. Ennek a kényszerkapcsolásnak a bekövetkezte után viszont már a kézi kapcsolóval sem lehetett az adatrögzítőt kikapcsolni (legfeljebb az MSzRP AZSz-szel lehetett volna ezt megtenni). Földi hajtóműpróbázások alatt viszont kötelező volt a készüléket kézzel bekapcsolni, hiszen a földön is bekövetkezhetett esemény.
Azokon a gépeken, ahol MszRP-12 volt, ott a repülés vezérlésének, kormány- és gázkar-állások stb. „okos” rögzítő berendezése mellett még volt egy másodlagos, KZ-63 nevű, filmszalagba karcoló műszere is, ami más elven, más hordozóra rögzítette a leglényegesebb repülési adatokat. Ehhez nagyon hasonló adatrögzítő (is) működik a Mi-8-as helikopterekben még ma is. M.A.: A rendszer típusa 1974-től MSzRP-12-96 lett, az MSzRP-12 típust pedig a Malév kiselejtezte. A HA-MOH lajstromjelű Il-18-as repülőgép katasztrófája idején már ez az újabb rendszer volt a gépeken, 1975 januárjában. Ez a repülés utolsó 30 perce helyett a repülés 75 percét rögzítette, mágnesszalagra. Rövidesen pedig a Malévnál nem szovjet szalagra, mert azt a rossz minősége miatt megszüntettük, hanem az AGFA PER-525, majd a PER-528 típusú szalagra. Ez az a rózsaszínű hátoldalú magnószalag, amelyet a Múzeum honlapján is lehet látni egy fényképen. Ezt a szalagtípust nem „a szolnoki műszakiak szerezték a Magyar Rádió szolnoki stúdiójából”, hanem a Malév szerezte be az AGFA-tól. A fényképen látható 21666 gyári számú szalagtovábbító mechanizmust eredetileg nem a hadsereg üzemeltette, hanem a Malév, és a Malévtól kapta meg a hadsereg, míg végül az a múzeumban kötött ki. A képen látható példányra konkrétan is emlékszem, mert annak nem volt gyáriszám-táblája, és ezért én festettem rá feketével a gyári számot, szögletes orosz számokat utánozva, ha jól emlékszem 1984-ben. Szintén az én kezem „munkája” a szalagbefűzési rajz módosítása filctollal a konténer belső felületén, ugyanis kétféle befűzési módú készülék létezett, és ez a mechanizmus egy másiknak a konténerét kapta meg. Maga a berendezés nem sokat repülhetett, mert emlékeim szerint a paszportjával gond volt – más típusszám szerepelt abban a H20.61.041 helyett – és ezért kivonták a forgalomból. E mechanizmus „testvére”’, a 21665 gyári számú példány nálam van otthon, emlékbe… Mindkettőt 1982-ben gyártották. Az emulzió nélküli filmszalagba karcoló berendezés típusa helyesen K3-63 (a cirill Z és a 3-as szám nem mindig egyértelmű). Ez három paramétert: a sebességet, a magasságot és a függőleges gyorsulást mérte és rögzítette. Elődje a K2-75 típus volt, amely csak két paramétert rögzített, a sebességet és a magasságot.
M.A.: Ez nem a KSz-6 irányrendszer kijelzője, hanem a NI-50BM-3 (és az ANU-1) típusú autonóm navigációs rendszerek kijelzője: az SzCs típusú számláló.
Tőle jobbra valamiért egy varió található, a Ksz-6-nak nem része. Utána következik az irányautomata: M.A.: Ennek típusa eredetileg PDK-3 volt, majd AK-ra és AK-1-re változott.
Az alján levő tekerővel állítható be a Ksz-6 rendszer számára a „térképszög”, azaz az észak-kelet koordinátarendszer elforgatásának szöge, és a gép haladási irányának kijelzője. M.A.: A KSz-6 irányrendszernek nem kellett a térképszög. A térképszöget az autonóm navigációs rendszer számára állította be itt a navigátor a kisméretű ablakban lévő skálán. Az irányautomata a gép haladási irányának nem volt kijelzője, hanem a géptengely-irányszög kijelzője volt, ami nem azonos a repülőgép haladási irányával. Az irányszög-jel a KSz-6 irányrendszerből érkezett ide, és egy repülőgépet ábrázoló mutatóval jelenítették azt meg a külső, nem mozgó skála mentén.
Ettől jobbra egy KUSz- kombinált sebességjelző, ami az „IAS” és „TAS” értékeket mutatja a külső és a belső skálán. Ettől jobbra a girórendszerek fő ellenőrző kijelzője, az IKU-1D műszer, aminek a „G” mutatója a girórendszer aktuális üzemmódja szerinti irányt mutatja (mágneses korrekciós, önálló giróiránytűs vagy asztrokompasz szerintit), illetve az „A” tűje minden esetben az asztrokompasz által mutatott irányt. M.A.: A műszer típusa nem IKU-1D, hanem UGA-1U. Volt ugyan IKU is az Il-18-as repülőgépeken, kettő is, de azok a KURSz-MP-1, majd a KURSz-MP-2 típusú rádiónavigációs rendszerek műszerei voltak, és a pilóták előtti műszerfalakon nyertek elhelyezést. E műszerek típusa IKU-1A volt.
Ettől jobbra az emeletes, recés tekerő teszi lehetővé a szél irányának, és sebességének kézi bevitelét, illetve a kívánt útirány szögének beállítását. M.A.: Háromféle széladatbeállító egység létezett, amelyek egyformán néztek ki. A DV és a ZV típusokon 0–150 km/h szélsebességet lehetett beállítani, a ZV-1 típuson pedig 0–200 km/h-t. A szélirányt és a szélsebességet vagy a földi repülésirányító szolgálat közölte a repülőgép személyzetével rádión, vagy a navigátor számolta azokat ki. Amennyiben nem lehetett tudni e paraméterek értékeit, akkor nullára kellett állítani ezek gombjait, mert ez még mindig kisebb hibát vitt be az útvonalszámításba, mint a helytelen szélparaméterekkel való számítás. A Tu-154-es repülőgépen úgy oldották meg ezt a problémát, hogy az NVU-B3 típusú autonóm navigációs rendszer saját maga számolta ki mind a szélsebesség (u), mind a szélirány (δ) értékeit a földfeletti sebesség (w), a valós légsebesség (TAS) és a széleltérítési szög (USz vagy α) ismert értékeiből, és amikor a DISzSz esetleg meghibásodott, akkor nem kellett a széladatokat a földi repülésirányító szolgálattól megkérdezni vagy kiszámolni, mert azok azonnal rendelkezésre álltak.
A második sorban egymás alatt két magasságmérő, egy feet és egy méter alapú található. M.A.: A feet-es magasságmérő amerikai, Kollsman gyártmányú volt. Amikor a hatvanas években beszerelték a Malév Il-18-as repülőgépeibe, akkor a szovjet ipar még nem tudott – vagy nem kívánt – olyan, feet-ben mérő elektromechanikus magasságmérőt kínálni, amely elektronikus magassági kódot tudott volna szolgáltatni a Malév Il-18-as repülőgépeibe szintén akkor beépített fedélzeti válaszjeladó készülék – az ATC transzponder – számára, amelyből szovjet gyártmány akkor még szintén nem létezett. Így a Malév az Il-18-as repülőgépeibe Wilcox gyártmányú, ATC-914A típusú válaszjeladó készüléket épített be. Később volt szovjet típus is: a SzOM-64, majd a SzO-70. A Kollsman magasságmérő alatt egy szovjet gyártmányú, méteres, elektromechanikus magasságmérő található, típusa UVID-30-15. Ennek lett később feet-es változata is: az UVID-15F.
Középen az US (Ukazatyel sturmana-navigátor kijelzője) fő műszer látható. Ennek két mutatója és egy mozgatható belső skálája van: A két mutató az ARK1/VOR1 és ARK2/VOR2 között átkapcsolhatóan mutat irányt, az elforgatható skála a helyi mágneses-tényleges irány közti különbség szerinti beállítást tesz lehetővé. A skála bal oldalán levő külső, kis skála és a kintről befele mutató kis mutató teszi lehetővé ennek az értéknek a pontos beállítását. M.A.: A belső skála az irányrendszer azimut-tárcsája, amit maga az irányrendszer mozgat. A külső skála mozdulatlan. A bal oldalsó kis indexmutatóval a deklináció – a mágneses elhajlás – értékét lehetett beállítani a műszer gombjának elforgatásával.
M.A.: A robotpilóta központi pörgettyűs függőlegese – a CGV-4 típusú girovertikál – szolgáltatta a dőlésjelet az irányrendszer GA-1T típusú giroagregátjai számára annak érdekében, hogy azok követőkeretjei fordulóban is vízszintesek maradjanak, és így ne vigyenek be irányhibát. Ez volt az ún. kardánhiba, amely hatással volt viszont a GPK-52AP típusú félkompaszra, ami miatt az helytelen irányt mutatott fordulóban, amig be volt dőlve a repülőgép. A CGV-4 meghibásodása esetén – amikor a CGV keretei felborultak – a hibás CGV valahová elkóválygó dőlésjele helyett egy ellenállásokból összeállított feszültségosztót lehetett a GA-1T giroagregátokra kapcsolni, ami nulla fokos dőlésnek felelt meg. Erre szolgált ez a kapcsoló.
M.A.: Típusa IDR-1 volt, és ez már tengeri mérföldben mutatott, nem úgy mint az első változat, amely még kilométerben jelezte az adótól mért – ferde – távolságot. A kilométeres indikátorokra egy átszámító tárcsát szereltek fel a Malév Il-18-as gépein.
M.A.: Ez a TNV-15 típusú külsőlevegő-hőmérőnek a TNV-1 típusú jelzőműszere, amelynek P-5 típusú hőmérséklet-érzékelője a törzs oldalán volt található. A külső levegő valós hőmérsékletét egy átszámító grafikonnal kellett meghatározni a repülőgép pillanatnyi Mach-számának függvényében. Például, ha a hőmérő –4 °C-t mutatott 0,65M sebességnél, akkor odakint –16 °C volt a levegő hőmérséklete.
M.A.: Ez a KSz-6 irányrendszer távkezelő pultja, ami lehet PU-2 vagy PU-1 típus is.
Legfölül a Ksz-6 irányrendszer fő üzemmód- és girókiválasztó kapcsolója: MK- mágneses korrekciós mód, ami kisegítő mód a fő girók beállításához, GPK – giropolukompasz, a normál giró szerinti irány használata, AK-asztrokompasz – a Nap állása szerinti iránymeghatározás. Alatta egy balra-jobbra billenthető, középállású kapcsoló, ami beállítási és ellenőrzési céllal az aktuális giró állását „balra” vagy „jobbra” mozdítja. Ez alatt két kapcsoló található: a repülőgép földrajzi helyzete szerinti északi- vagy déli félteke kiválasztása, ez a giró menet közbeni „elmászási” korrekciójának szabályozásához kell. Ettől jobbra a fő és ellenőrző/tartalék giró kiválasztó kapcsolója található. Alatta a forgótárcsa az repülőgép útjának „átlagos” földrajzi szélességét kell beállítani, ez szintén a giró korrekciójához szükséges „bemenő adat”. A legalsó gomb (Szaglaszovanyije-egyeztetés) az aktuális girót egyezteti: MK módban a fő- és tartalék mágneses korrekciós vevőn az induktív érzékelő által meghatározott aktuális mágneses irány gyorsított felvételét teszi lehetővé, (ezt el kell végezni a fő és a tartalék mágneses giróra is). GPK módban a tényleges irányt mutató girókat igazítja a mágneses giróhoz. AK módban a kezdeti irány gyorsított felvételét szolgálja.
A navigátorral szemközti panelen kívül még a bal vállánál, az először említett AZSz panel alatt van a VOR vevők frekvenciáját beállító műszer, illetve a „Mikron” rövidhullámú rádió navigátori panelen levő távkezelő pultja. M.A.: Ettől jobbra található az SzD-67M típusú távolságmérő (DME) berendezés távkezelő pultja. A navigátor jobb keze felőli részen pedig nem a távolságmérő (DME) berendezés távkezelő pultja van, ahogyan az Zainkó Géza egyik fényképe aláírásánál szerepel a Múzeum honlapjának egy másik részén, hanem az ott a fedélzeti válaszjeladó berendezés – az ATC transzponder – távkezelő egysége.
A Ksz-6 rendszer a Trassza-val együtt vagy anélkül volt képes követni a gép helyzetét, illetve a beállított térképszög, széleltérítés és kívánt útirány szög alapján az előrehaladást 0 oldaleltéréssel fenntartani. Ehhez a pilóták műszerfalán kellett az AP-ANU gombbal a robotpilótára rákapcsolni az autonóm navigációs rendszert. M.A.: A KSz-6 irányrendszer semmi mást nem tett, mint a repülőgép irányszögét határozta meg. A gép helyzete pedig nem azonos a repülőgép helyével. A repülőgép helyét az autonóm navigációs rendszer határozta meg, a repülőgép helyzetét pedig a műhorizontokon lehetett megfigyelni, dőlés és bólintás szerint. Az említett három paraméter közül kettő egy és ugyanaz: a térképszög és a kívánt útirány szöge, és a széleltérítés szögével együtt csak két adat (OZMPU és USz az ábrán), amelyekből nem lehet semmit sem kiszámítani. Az AP-ANU gomb feladata az volt, hogy az autonóm navigációs rendszer által kidolgozott, a kívánt útvonaltól való eltéréssel arányos jelet a robotpilótára kapcsolja abból a célból, hogy az vezesse a repülőgépet a kívánt útvonalon 0 oldaleltéréssel. Azonban ilyen robotpilóta-üzemmód a Malév Il-18-as repülőgépeinek egyikén sem volt, mert a Malév Il-18-asain üzemelt AP-6E típusú robotpilóta erre a feladatra nem volt alkalmas. Alkalmas volt viszont az AP-6EM-ZP típusú robotpilóta, amely az Aeroflot, a Balkan, a CSA és az Interflug késői gyártású Il-18-as gépein üzemelt. Ennek megfelelően AP-ANU gomb nem volt a Malév Il-18-as repülőgépein. Volt viszont ilyen üzemmód a Malév Tu-134 és Tu-134A típusú repülőgépeinek mindegyikén, mert azokon már AP-6EM-ZP típusú robotpilóta üzemelt, a HA-LBP és -LBR lajstromjelű gépeken pedig már az AP-134 típus.
Gyakorlatilag ezzel azonos rendszer volt megvalósítva a Tu-134-eken is. Az, hogy a robotot mennyire használták leszállásvezérlésen kívül másra nem tudom, M.A.: A Malév Il-18-as repülőgépein leszállásvezérlésre egyáltalán nem használták sem a Trasszát, sem a robotpilótát. A Trassza alkalmazása erre a feladatra csak egy végszükségben alkalmazható lehetőség volt, és felesleges is a földi telepítésű NDB (ARK) és VOR/ILS adók miatt. Az AP-6E típusú robotpilóta pedig alkalmatlan volt a leszálláshoz való bevezetésre. Az AP-6E a repülőgép három tengelye körüli szöghelyzetének stabilizálásán túlmenően csak a barometrikus magasság tartására volt alkalmas, valamint forduló végrehajtására a Fordulógomb segítségével és új bólintási szögre való állásra a Süllyedés–Emelkedés tárcsa használatával. A robotpilótát dobálós időben és 1000 m repülési magasság alatt előírásszerűen ki kellett kapcsolni, használata tilos volt! A Malév pilótái még útvonalrepülések során se nagyon használták. E robotpilóta továbbfejlesztésének eredménye lett az AP-6EM-ZP típus, amely már alkalmas volt a leszálláshoz való bevezetésre, de ez a robot a Malév egyetlen Il-18-as repülőgépébe sem volt beépítve. A Malév Tu-134 és Tu-134A típusú repülőgépein viszont megtalálható volt HA-LBA-tól HA-LBO-ig. a későbbi gépeknél (134, 154) úgy tudom, hogy a robotra bízott módok a koordinált fordulón és az emelkedés/állandó magasság/süllyedés szabályozásán kívül nem volt használatban, mivel nagyon „energikus” módon döntötte be a gépet a fordulókhoz és a kívánt irány eléréséhez. M.A.: Az összes Tu-134-es és Tu-154-es repülőgép-változaton a robotpilótának volt olyan üzemmódja, amelyben az autonóm navigációs rendszer össze volt kötve a robotpilótával, és az nem vitte a gépet energikus módon dőlésbe. Az ami a repülőgépet energikusan dőlésbe vitte, az egy másik robotpilóta-üzemmód volt, de az csak a Tu-154-es gépeken létezett: az volt a „ZK” üzemmód (Zadatcsik Kursza – iránybeadás), de annak semmi köze nem volt a fent említett irány- és navigációs rendszerek egyikéhez sem. A „ZK” üzemmódban a PNP-1 típusú navigációs műszer egyik gombjának elforgatásával lehetett fordulóba vinni a Tu-154-es repülőgépet. Emellett számos más robotpilóta-üzemmód is létezett, különösen a Tu-154-esen, és azok többségét használták is. Koordinált fordulóról pedig a korszerű, nyilazott szárnyú utasszállító repülőgépek esetében már nem is nagyon beszélhetünk, mert ezek a repülőgépek a fordulókat csűrőkormánnyal hajtják végre, hiszen a sárkány aerodinamikája miatt a bedöntött repülőgép egyben fordul is. Ilyen pl. a Tu-154.
(Így az AP+ANU módot sem biztos, hogy használták.) M.A.: Bizony nem, de nem azért, mert az rossz volt, hanem azért, mert használatára egyáltalán nem volt szükség a Malévnál.
M.A.: A VOR szerinti automatikus útvonalrepülés nem a rádiónavigációs rendszer üzemmódja, hanem a robotpilótáé, de a Malév Il-18-as gépein tényleg nem volt a robotnak ilyen üzemmódja. Viszont más légitársaságok: az Aeroflot, a Balkan, a CSA és az Interflug késői gyártású Il-18-as gépein igen. Természetesen lehetséges volt a Malév Il-18-as repülőgépein is a VOR adók szerint navigálni, de csak manuálisan. Magyarul: vezetni kellett a repülőgépet.
A Ksz-6 irányrendszer vázlata: DAK-DB-5: Asztrokompasz M.A.: Nem volt része a KSz-6-nak. Ez egy önálló irányrendszer volt, de része volt a repülőgép irányrendszereinek, és szoros kapcsolatban állt a KSz-6-tal.
UGA-1A: Giró és asztrokompasz kijelzője M.A.: Típusa helyesen UGA-1U volt.
ID-Indokcionnüj dátcsik: földmágneses irány indukciós érzékelője M.A.: Típusa ID-2 volt az Il-18-ason, és a törzs farokkúpjában helyezték el.
KM-Korrekciós mechanizmus M.A.: Típusa KM-4 volt az Il-18-ason.
ARK-1, ARK-2: A két ADF vevő M.A.: Itt a rajzról hiányzik a két VOR vevő, mert amikor tervezték ezt az irányrendszert, akkor a Szovjetunióban még egyáltalán nem volt földi VOR adó telepítve, és később is először csak kettő volt, és azok is csak annak érdekében, hogy a külföldi légitársaságok járatait segítség a Moszkváig tartó útvonalon. A VOR rádiónavigációs rendszer szerinti navigációra alkalmas szovjet fedélzeti rendszer csak a hatvanas évek végére készült el KURSz-MP néven, és az Il-18-as repülőgépeknek csak az utolsó szériáit szerelték fel azzal. A Malév erre nem várt, és Wilcox gyártmányú VOR/ILS vevőket alkalmazott már a hatvanas évek elejétől, amelyeket a repülőgépek nagyjavításai során végül KURSz-MP-re cseréltek ki.
US-Navigátor kijelzője a két nagy mutatóval GA-girók (osznovüj:fő, zapasznüj:tartalék) M.A.: Típusuk GA-1T volt az Il-18-ason. CGV-központi giróvertikál M.A.: Típusuk CGV-4 volt az Il-18-ason. VK-(azt hiszem, „kiejtőkapcsoló”, „0”-t ad a CGV jele helyett, „Ksz-6 CGV-vel vagy nélkül” kapcsoló) M.A.: Helyesen korrekció-kikapcsoló egység (vükljucsátyel korrekcija), amely szintén egy pörgettyűs berendezés volt, és a repülőgép elfordulási szögsebességét érzékelte kétszabadságfokú pörgettyűjével. Az egység feladata az volt, hogy a robotpilóta központi pörgettyűs függőlegesei (a CGV-k) keresztirányú helyesbítő áramköreinek működését megszakítsa forduló végrehajtása közben a forduló időtartamára annak érdekében, hogy ne keletkezzen téves dőlésjel a CGV-kben. A VK-nak semmi köze nem volt a navigátornál elhelyezett „KSz CGV-vel - CGV nélkül” feliratú kapcsolóhoz. Nem adott „0”-t a CGV helyett. A CGV meghibásodása esetén nem a VK (amelynek típusa eredetileg VK-53RB, majd VK-53RS volt), hanem egy ellenállásokból felépített feszültségosztó szolgáltatta a „0” dőlésjelet. Ez pedig a BR-1 típusú reléegységben volt elhelyezve.
A Ksz-6 vezérlőpultja és műszerei: 1 – Vezérlőpult, 2 – Navigátor műszere, 3- UGA-1U műszer, 4 – UK-1 műszer M.A.: A 4-es számmal jelzett, UK-1 típusú műszerből kettő darab volt, és a pilóták előtti műszerfalakon helyezték el azokat. A navigátornál ilyen műszer nem volt. Hasonlított a navigátor AK-1 típusú irányautomatájára.
Az ARK-11 vevő vételi diagramja a fő- és a kiegészítő keretantenna esetén: 1 – fő keret, 2 – kiegészítő keret
M.A.: És hogy még egy csavar legyen a történetben: A szovjetek a Trasszának típusjelet is adtak, noha a Trassza valójában két, saját típusjellel is ellátott rendszer összefoglaló neve volt csupán, tehát a DISzSz-3P és az ANU-1 típusú rendszereké. A Trassza típusjele az Il-18-as repülőgépen NASz-1B volt, a Tu-134 és a Tu-134A típusú repülőgépeken pedig NASz-1A-6k. Külön érdekesség, hogy 1971-től, a HA-LBI lajstromjelű Tu-134A típusú repülőgéppel kezdődően felhagytak a Trassza megnevezéssel, és eltűnt a NASz típusjel is, miközben minden maradt a régiben, tehát a DISzSz-3P és az ANU-1 továbbra is ugyanúgy működtek a fedélzeten, mint korábban. Valószínűleg a tervezők rájöttek arra, hogy felesleges típusjelet adni annak, aminek egyébként, ha külön-külön is, de már van. A NASz-1A-6k egyébként csak kevéssé tért el a NASz-1B-től.
Végezetül, csak remélhetem, hogy minden érthető volt, amit írtam – igyekeztem érthetően fogalmazni. (Csak azt nem tudom, hogy érdekelnek-e még manapság ezek a dolgok egyáltalán valakit…)
Üdvözlettel: Mészáros András 2008. XII. 14.
|